
http://www.cc.u-ryukyu.ac.jp/~arakaki/
[お知らせ] なし
プログラムの画像を右クリックし、リンク先を保存することでhexファイルを入手できます。 ダウンロードフォルダに保存されます。 マイクロビットのプロジェクト表示画面の右側に読み込みボタンがあるのでそこからファイルを読み込んでください。



送信機側マイクロビットを倒した方向にノーマルで1秒ずつ進んだり向きを変える Bボタンを押す度に動作の間隔が短くなる。Aボタンでリセット。起動時にロゴをタッチすることで無線グループを変えられる。左:送信側、右:受信側





・電源:コネクター+と-に直流3.3~5.5Vを加える。 ・ドライブ能力:連続動作電流1.5A以下 ・ピンヘッダーを通してmicro:bit下部の入出力端子を利用できますP0 P1 P2 P8 P12 P13 P14 P15 P16 ・モーターは4台接続可能 ・サーボは8台接続可能 ・プログラムするための拡張命令ブロックが用意されており、MakeCodeの拡張機能から画面上の検索に「https://github.com/DFRobot/pxt-motor」を入力する。 参照:microbit wiki
 download
download
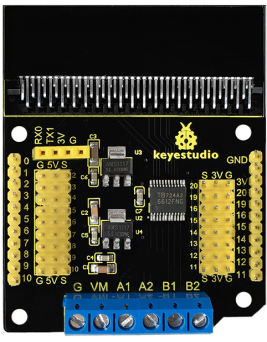
・電源:コネクターVMとG間に直流6~12Vを加える。VMに+、Gに-をつなぐ。
実験では5.8Vで動いた。モーター2つ動かすと4.8Vまで電圧降下。
とりあえずアルカリ4本で動く
・ドライブ能力:連続動作電流1.2A以下
・ピンヘッダーを通してmicro:bit下部の入出力端子を利用できます
・モーターをまわすには、A1、A2にモーターをつなぎ、プログラムからP1にアナログ信号を
0~1023の範囲で出力するとともに、プログラムからP12、P13にデジタル信号で
回転方向を指示します。
アナログ信号は回転の強さを指示します。
デジタル信号は2つの端子に0か1を加えることで4つの状態、前転、後転、ブレーキ、
停止を作ります。0と1、1と0のように2つの端子に異なる信号を与えるとモーターは回ります。
0と0は停止で、1と1はブレーキです。
ロボコンのように細かい動きをするにはブレーキを利用するといいでしょう。
・2つ目のモーターを回すにはB1、B2にモータをつなぎ、プログラムからP2にアナログ信号、P15、P16にデジタル信号を与える。
おまけ
・1つのモーターを回すのに3つの端子に信号を与えるため、3命令が必要です。
毎回数字をいちいち考えるのは面倒なので一度うまくいったらそれを関数にして
わかりやすい名前にしておくと便利です。
上のプログラムではパワーを変えるつもりがないので最初でパワー指定をP1、P2
で行い、ボタンが押されたときでは、1モーターにつき2命令で回転を指示している。
・※[最初だけ]においてP14にデジタル信号1を用意する必要がある。
ドライバーのSTANBYに信号送っていると思われる(堪)
参照:keyestudio wiki
 V1
V1
 参照:micro:bit技術資料
参照:micro:bit技術資料
 クリックで拡大
クリックで拡大
