作業能率の測定(耕耘作業)
目的
農業の機械化に関する研究は大きく2つに分けることができる。1つは機械そのものの開発・改良の研究である(ハード)。もう一つは機械の利用技術の研究、つまり農業機械を効率的に利用して省力で生産性の高い農業技術を確立するための研究である(ソフト)。ここでは後者の研究について、その役割と意義を学ぶことを目的とする。
今回は耕耘機による耕耘作業をとおし、機械の作業試験の方法を習得し、作業条件や作業能率を評価する。
内容
耕耘(こううん)機による犂耕(りこう)作業の能率の測定。 犂耕作業時のすべり率の測定。
使用器具
耕耘機、和犂、ストップウォッチ、巻尺、ポール、曲尺(かねじゃく)
作業能率の測定
1.調査項目
<機種・諸元等>
使用する耕耘機の機種、構造、諸元について調べる。型式、エンジンの特徴、タイヤの規格など。
<作業条件>
圃場条件、土壌条件、作物条件、機械の運転条件、オペレータの条件などがある。特に機械操作の面から明らかにしておかなければならないのは以下ことである。
作業法
機械の走行の順序、旋回方法など
作業人員
オペレータの他に補助者の人数、性別、年齢など。
作業回数
ロータリ耕耘などの場合砕土性を高めるため2回以上耕耘する場合もある。
作業幅
機械の大きさから決まる理論作業幅と、実際に作業を行ったときの1行程
の幅である有効作業幅がある。ここでは犂によって耕される耕幅のことであ
る。
作業速度
実際の直進作業時の時間を計測し求められる有効作業速度と、作業精度が
低下しない範囲の、最高速度である理論作業速度がある。しかし、理論作業
速度は圃場条件、オペレータの技量で変わり一定値では表現しにくい。
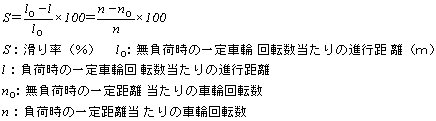
すべり率
トラクタなどの駆動輪のスリップの状態を表示するため、無負荷時に対す
る負荷時の車輪の滑り程度を次式で表し、すべり率という。
![]() (1)
(1)
S :すべり率 (%)
l0 :無負荷時の一定車輪回転数当たりの進行距離 (m)
l :負荷時の一定車輪回転数当たりの進行距離 (m)
n0 :無負荷時の一定距離当たりの車輪回転数
n :負荷時の一定距離当たりの車輪回転数
すべり率は大きくなると、普通けん引力が大きくなる。すべり率が100%に
近づくと前進がほとんど見られなくなる。
すべり率の測定は車輪の外縁にマーカをつけ、定常状態で走行中にマーカ
が接地した地点から、一定回数回転後に再び接地した地点までの距離測定を、
負荷・無負荷状態で数回行う。測定値は平均値を表示する。
燃料消費量
機械の利用経費や作業時のエンジンの負荷状態を知るには、燃料消費量を
測定する必要がある(今回は測定しない)。
2.方法
一定距離(通常10m)の間の直進作業時間を求め、有効作業速度を求める。また、圃場端での旋回所要時間を測る。さらに、耕幅、耕深およびすべり率を測定する。(いずれも5回以上測定する。)
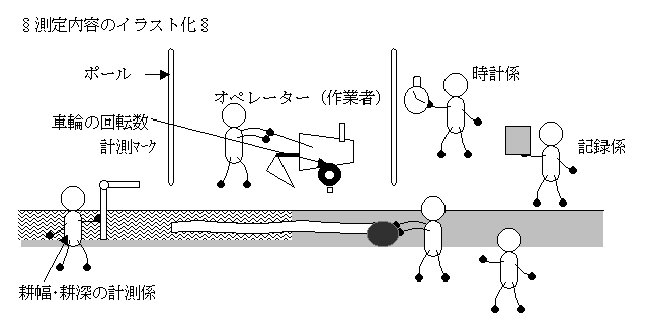
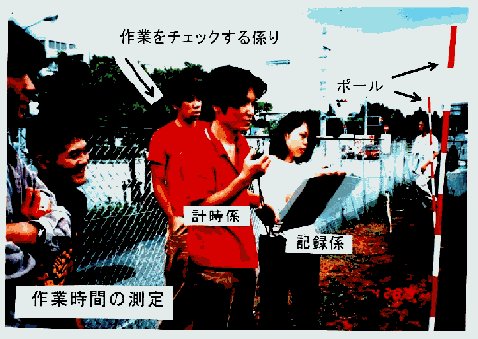
《作業手順》
犂耕時に各グループ毎に作業を分担し,次のことを測定する。
1 ストップウォッチで作業時間、旋回時間、レバーをひくまでの時間をはかる班
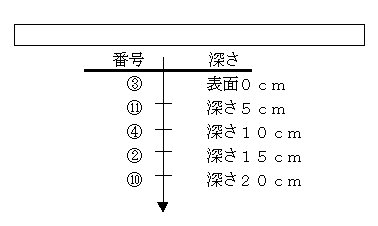
2 耕運機で作業を行い曲尺を用いて耕幅、耕深をはかる班
3 巻き尺を用いてタイヤが3回転した距離をはかる班
2回ずつ計6回測定を行なう。
3.作業能率の計算
作業能率を表すには、通常2通りの方法がある。すなわち
である。この二つは逆数の関係にあるので一方がわかれば片方は容易に換算できる。
ここでは単位時間当たりの作業面積を求める方法として、有効作業速度、有効作業量、圃場作業量について示す。
有効作業速度
![]() (2)
(2)
v :有効作業速度 (m/s)
l1:直線距離 (m)
t1:直線距離l1を作業するのに要する時間 (s)
有効作業量
![]() (3)
(3)
Ce:有効作業量 (m2/s)
w :有効作業幅 (m)
有効作業量は実作業で枕時での旋回、機械調整のロスなどがないときの作
業量を示す。
なお、実際の圃場の大きさ、作業時間の長さを考え1時間あたりにどれく
らいの作業量が可能かを求めておく。
圃場作業量
実際の圃場では直進作業以外に旋回、機械の調整などの作業が加わる。こ
のような圃場での損失時間を含んだ実際の作業能率を圃場作業量という。圃
場作業量を求める前に以下の各作業に要する時間を求める。
ta:枕時での旋回・後退時間 (s)
ta:機械の調整時間 (s)
圃場作業量は圃場条件(大きさ形状等)によってかわる。ここでは単位面積(10a)当たりの所要時間を求める。10aの圃場として長辺55m、短辺18.2mのものを想定した。これは代表的な水田の区画が長辺54.5m(30間:1間(けん)=約1.82m=6尺)×短辺18.2m(10間)で面積が1反(約10a)であることを考慮した。
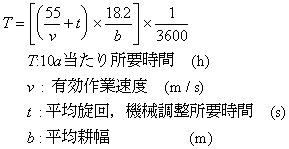 (4) 1時間当たりの作業面積は
(4) 1時間当たりの作業面積は
 (5)
(5)
で求められる。V、t、bは5回以上測定したデータの平均値を用いる。
4.結果の整理
有効作業速度、有効作業量、圃場作業量を求める。また、すべり率を求める。いずれも5回以上測定したデータの平均値を用いる。
実験装置:EXPERIMENT DEVICE
耕耘機、和犂、ストップウォッチ、巻尺、ポール、曲尺(かねじゃく)
実験方法:EXPERIMENT METHOD
《作業条件》
作業法:機械の走行の順序、旋回方法など
作業人員:オペレータの他に補助者の人数
作業回数:ロータリ耕耘などの場合砕土性を高めるため2回以上耕耘する場合もある。
作業幅:機械の大きさから決まる理論作業幅と、実際に作業を行ったときの1行程の幅である有効作業幅がある。ここでは犂によって耕される耕幅のことである。
作業速度:実際の直進作業時の時間を計測し求められる有効作業速度と、作業精度が低下しない範囲の、最高速度である理論作業速度がある。しかし、理論作業速度は圃場条件、オペレータの技量で変わり一定値では表現しにくい。
すべり率(slippage,travel reduction):トラクタなどの駆動輪のスリップの状態を表示するため、無負荷時に対する負荷時の車輪の滑り程度を次式で表し、滑り率という。
一定距離(通常5m)の間の直進作業時間を求め、有効作業速度を求める。また、圃場端での旋回所要時間を測る。さらに、耕幅、耕深、およびすべり率を測定する。(いずれも5回以上測定する。)
《手順》
畑にポールを差し込んで、計測を行いやすくする
結果:RESULT
表1 各測定値
|
1回目 |
2回目 |
3回目 |
4回目 |
5回目 |
6回目 |
7回目 |
平均 |
|
|
耕耘距離5mにかかる時間(s) |
|
16 |
14 |
24 |
15 |
19 |
17 |
17.5 |
|
旋回時間(s) |
|
14 |
11 |
16 |
21 |
17 |
16 |
15.8 |
|
レバー操作時間(s) |
|
10 |
10 |
12 |
8 |
6 |
11 |
9.5 |
|
旋回時間+レバー操作時間(s) |
|
24 |
21 |
28 |
29 |
23 |
27 |
25.3 |
|
耕耘速度(s/m) |
|
24 |
34 |
37 |
36 |
25 |
40 |
32.7 |
|
エンジンの回転数(rpm) |
|
1253.6 |
1250.9 |
1228.8 |
1246.4 |
1251.5 |
1251.9 |
1247.2 |
|
タイヤ2回転するときの距離(cm) |
|
316 |
250 |
149 |
243 |
211 |
193 |
227 |
|
滑り率(%) |
|
3.1 |
23.3 |
54.3 |
25.5 |
35.3 |
40.8 |
30.4 |
|
深さ(cm) |
|
9.5 |
10.3 |
14.2 |
14.8 |
14.5 |
10.5 |
12.3 |
|
幅(cm) |
|
19 |
18.5 |
20 |
18.5 |
14 |
12 |
17 |
タイヤが2回転するときの距離(m)(作業しない状態)
326cm作業しない状態でのエンジン回転数(rpm) 1251.7rpm
表2 有効作業速度、有効作業量、圃場作業量の値
|
1回目 |
2回目 |
3回目 |
4回目 |
5回目 |
6回目 |
7回目 |
平均 |
|
|
有効作業速度(m/s) |
|
0.31 |
0.36 |
0.21 |
0.33 |
0.26 |
0.29 |
0.29 |
|
有効作業量(m2/s) |
|
0.059 |
0.066 |
0.042 |
0.062 |
0.037 |
0.035 |
0.050 |
|
圃場作業量(ha /h) |
|
5.3 |
4.8 |
7.4 |
5.3 |
8.4 |
9.0 |
6.7 |
|
1時間当たりの作業面積(a/h) |
|
1.88 |
2.08 |
1.35 |
1.89 |
1.19 |
1.11 |
1.57 |
ロータリ耕うん
目的:AIM
先週に引き続き、作業能率の測定が主な目的であるが、今回はプラウ耕を用いずに、ロータリ耕を用いて作業能率を行う。ロータリ耕(rotary tillage)は、耕耘軸(rotary shaft,
tillage shaft)に装着された多数の耕耘づめ(rotary tine)または耕耘刃(rotary blade)により田畑を耕耘する方法で、プラウや犂がけん引耕耘であるのに対して、駆動耕耘の一種である。ロータリ耕をする機械をロータリ耕耘機械(rotary tiller)といい、わが国では和製英語のロータリという呼称が定着している。
プラウ耕や犂耕による反転耕は、砕土作業を砕土機で別に実施する必要があるが、ロータリ耕によるかくはん耕は、耕起と砕土の2作業を1行程で完了する便利性が特徴で、特に水田の代かきに優れた作業性能を発揮するのが重要な特徴である。
今回は、刃の形状にも注意して先週の結果も踏まえた上での実験を行う。
原理・理論:PRINCIPLE・THEORY
前回と同じなので、ここでは、ロータリの刃について少し述べておく。
●構造と種類
①動力伝達方式:動力伝達方式には、耕耘部の中央で伝達するセンタードライブ方式と、側方から伝達するサイドドライブ方式とがある。センタードライブ方式は、耕幅が60cm以下の小形ロータリ耕耘装置で用いれられ、左右に装着される耕耘軸の長さや種類、または耕耘刃の装着本数や種類を変更することにより多様な作業をすることができる。だが、残耕処理などの技術の面で複雑な問題が多数あり、歩行用の兼用形ロータリ耕耘機だけに用いられることが多い。サイドドライブ方式は、フレーム構造が強度的に有利で、駆動形耕耘機や乗用トラクタのロータリの標準方式となっている。ただし、重い動力伝達部品を内蔵した伝達フレームケースが側方にあるので、左右の重量配分がアンバランスになりやすく、機体直進性に影響が出たりするなどの欠点がある。
②耕耘軸の回転方向:通常のロータリは耕耘刃が耕土に対して下向きに回転切削するダウンカットロータリ(down-cut rotary tiller, forward-rotating rotary tiller)であるが、逆に上向きに回転切削するアップカットロータリ(up-cut rotary tiller, reverse-rotating rotary tiller)がある。
③耕耘づめの種類と特徴:耕耘づめにはさまざまな形状が開発・市販されている。大形畑作用ロータリに用いられる円板ホルダに2本のボルトで装着する欧米式のL形耕耘刃(L-typed rotary blade)と、水田用小形ロータリに用いられる矩形断面の筒形ホルダに1本のボルトで着用する、日本式のなた刃(Japanese rotary blade)がおもなものである。なた刃は、欧米のL形に対してC形耕耘刃(C-typed rotary blade)と表現されることもある。また、1970年代後半以降はL形とC形の中間形耕耘刃が装着されるようになった。
これらの標準的な耕耘刃のほか、なた刃の寿命を延長する目的で、直刃部縦幅を広くして先端わん曲部を緩やかにわん曲させた広幅緩曲なた刃が開発されている。
④耕耘軸:耕耘軸は製品の構造強度とともに下記の耕耘性能が求められる。
優秀なつめ配列の耕耘軸は、耕耘抵抗が10%前後に低減するが、これらを満足する優秀なCADソフトが、日本式のなた刃装着耕耘軸を対象にして構築され、設計者が必要と考える耕耘軸性能を選択しながら設計できる゛優秀なデータベース”の作成が可能になった。
●その他の回転式耕耘機械
ロータ耕耘機械:2輪の軽量超小形ティラの車輪駆動軸に各種ロータを装着して、後部ヒッチに抵抗棒(rear skid)を装着することにより、ハンドルの上下操作でロータの前進力を適当に制御すると、ロータは耕土中に沈下して畑作のかくはん耕耘が可能となる。この耕耘方式をロータ耕(rotor tillage)という。
駆動ディスク耕耘機械:一般畑作用のディスクをトラクタPTO軸で駆動する反転耕用の耕起機械が駆動ディスクと称されており、ワンウェイ式とツーウェイ式がある。
ディスクの刃の形式は背面刃と内面刃に2大別されるが、一般的には背面刃の市販品が多い。機体の前進方向に対するディスクの偏位角をギャング角(gang angle)またはディスク角(disk angle)という。
その他:スクリュ式耕耘装置(Japanese gyro-tiller)や、クランク式耕耘装置がある。
実験装置:EXPERIMENT DEVICE
耕耘機、ロータリ(なた刃)、ストップウォッチ、巻尺、ポール、曲尺(かねじゃく)
実験方法:EXPERIMENT METHOD
実験方法もほぼ前回と同じだが、今回は追加実験として消しゴムを埋め込んで消しゴムの移動距離を調べた。
結果:RESULT
表1 各測定値
|
1回目 |
2回目 |
3回目 |
4回目 |
5回目 |
6回目 |
平均 |
|
|
耕耘距離5mにかかる時間(s) |
15 |
14 |
16 |
16 |
17 |
17 |
15.8 |
|
旋回時間(s) |
8 |
9 |
10 |
12 |
10 |
8 |
9.5 |
|
レバー操作時間(s) |
4 |
2 |
3 |
4 |
3 |
2 |
3.0 |
|
旋回時間+レバー操作時間(s) |
12 |
11 |
13 |
16 |
13 |
10 |
12.5 |
|
耕耘速度(s/m) |
21 |
23 |
23 |
26 |
24 |
26 |
23.8 |
|
エンジンの回転数(rpm) |
1244.4 |
1243.1 |
1252 |
1225.2 |
1247.5 |
1248.5 |
1243.5 |
|
タイヤ2回転するときの距離(cm) |
342 |
322 |
335 |
329 |
334 |
333 |
332.5 |
|
滑り率(%) |
-4.9 |
1.2 |
-2.8 |
-0.9 |
-2.5 |
-2.1 |
-2.0 |
|
深さ(cm) |
14.1 |
15.9 |
15.4 |
18.2 |
19 |
17.9 |
16.8 |
|
幅(cm) |
69 |
68.5 |
78.7 |
69 |
71.6 |
78.5 |
72.6 |
タイヤが2回転するときの距離(m)(作業しない状態)
326cm作業しない状態でのエンジン回転数(rpm) 1251.7rpm
表2 有効作業速度、有効作業量、圃場作業量の値
|
1回目 |
2回目 |
3回目 |
4回目 |
5回目 |
6回目 |
平均 |
|
|
有効作業速度(m/s) |
0.33 |
0.36 |
0.31 |
0.31 |
0.29 |
0.29 |
0.32 |
|
有効作業量(m2/s) |
0.23 |
0.24 |
0.25 |
0.22 |
0.21 |
0.23 |
0.23 |
|
圃場作業量(ha /h) |
1.30 |
1.22 |
1.21 |
1.41 |
1.41 |
1.27 |
1.30 |
|
1時間当たりの作業面積(a/h) |
7.71 |
8.21 |
8.24 |
7.11 |
7.08 |
7.88 |
7.71 |


和犂

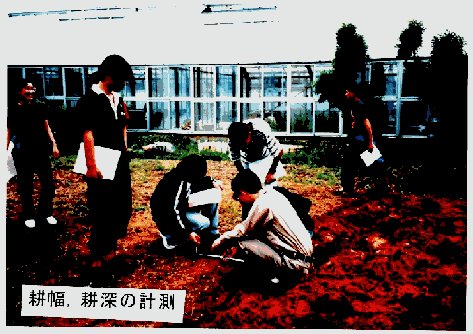
犂で耕された圃場。耕幅の計測中。

ロータリによる耕うん。耕うん前と耕うん後の圃場を比較してください。
(この資料を作成するにあたり1999年度学部生 玉井祐介氏の協力を得ました。)